第 9 课 · AI 摄像头入门
这一课学什么?
前面的模块大多是在读取一个数值,比如距离、亮度或命令编号。
AI 摄像头更进一步,它读取的是画面里的目标和特征。
这一课不追求一次把所有视觉能力都混在一起,而是先学会稳定读取结果,再把结果映射成动作。
学习目标
- 理解
init()、change_algo()和读取函数之间的关系 - 知道为什么视觉任务要一次只做一个
- 会从卡片识别、颜色识别、巡线三种任务里各跑通一个最小示例
- 会把视觉结果翻译成屏幕反馈或机器人动作
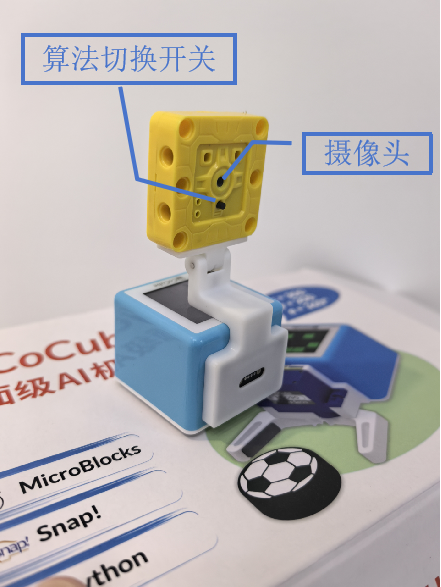
用到的硬件和功能
这一课建议先以 cocube_sengo2 为例。
如果你使用的是 cocube_sengo1,核心思路和大部分函数名都非常接近。
会用到的接口主要有:
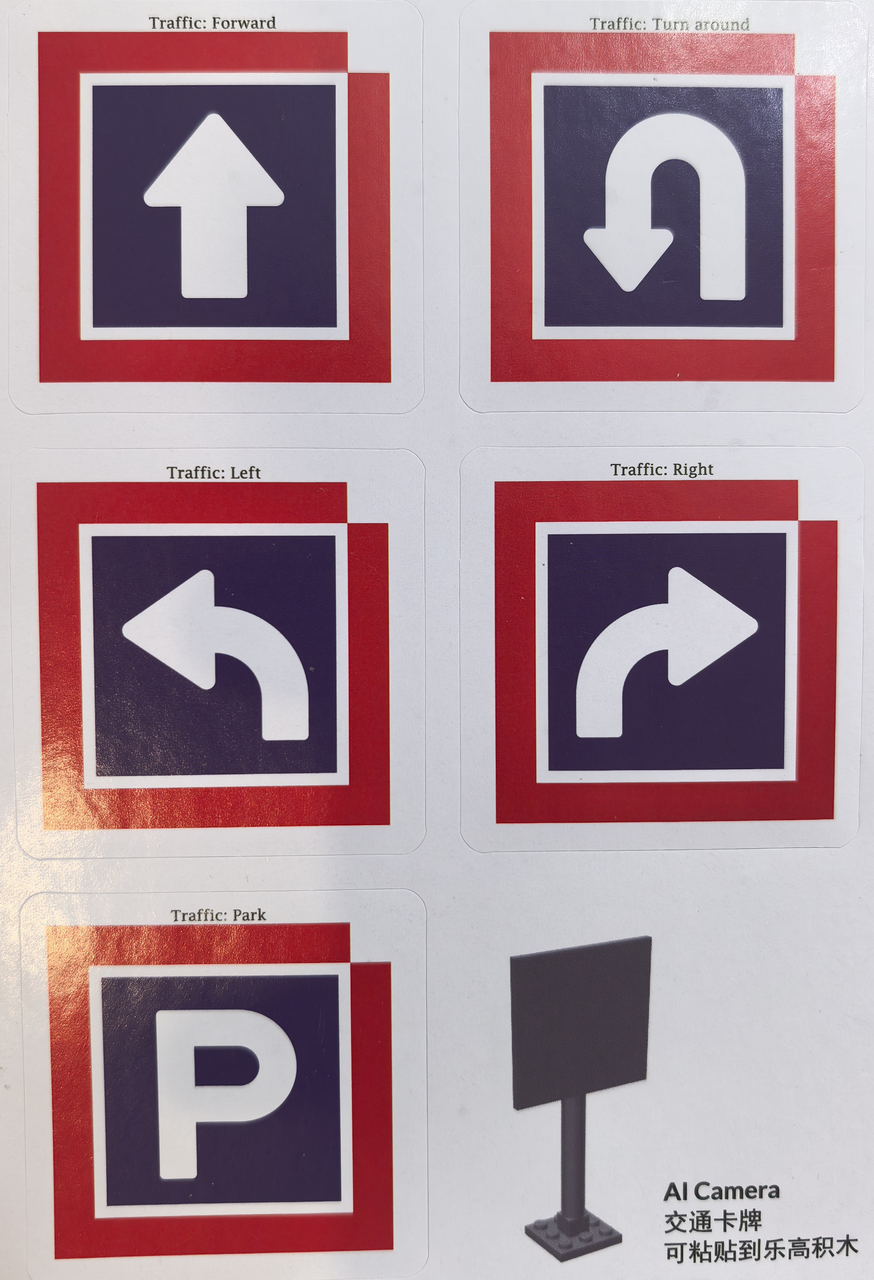
sg2.init():初始化摄像头并等待就绪。通常只在程序开始调用一次。sg2.change_algo(mode):切换算法。mode可选"Color Recog"、"Blob Detect"、"AprilTag"、"Line Detect"、"Deep Learning"、"Card Recog"、"Face Recog"、"Obj20Class"、"QRcode"、"Motion Detect"。sg2.read_card():读取卡片名称,常见结果有forward、turn_left、turn_right、turn_around、park、green_light、red_light、speed_40、speed_60、speed_80。sg2.get_card(tag):读取卡片检测框参数。tag可选"x"、"y"、"w"、"h";分别表示检测框位置和大小,本课主要用"w"过滤太小的目标。sg2.read_color():读取颜色名称,常见结果有black、white、red、green、blue、yellow、unknown。sg2.get_color_rgb(channel):读取颜色的 RGB 分量。channel可选"R"、"G"、"B",返回0~255。sg2.get_line(tag):读取巡线结果。tag可选"x1"、"y1"、"x2"、"y2"、"degree";x1/y1和x2/y2是线段两端点,degree是线条角度。display.init():初始化屏幕,返回tft对象,颜色识别示例里会用它做界面反馈。display.color565(r, g, b):把0~255的 RGB 三通道值转换成屏幕可用颜色。r/g/b分别是红、绿、蓝分量。display.write(text, x, y, color=display.WHITE, bg=display.BLACK, size="normal"):显示文字。text是字符串;x/y是坐标;color是字色;bg是背景色;size可选small、normal、big。tft.fill(color):整屏填色。color一般传display.color565(...)的结果。cocube.move_ms(direction, speed, ms):按时间直行或后退。direction取cocube.FORWARD/cocube.BACKWARD;speed是速度;ms是时长。cocube.rotate_ms(direction, speed, ms):按时间转向。direction取cocube.LEFT/cocube.RIGHT;speed是转向速度;ms是时长。cocube.set_wheel(left, right):直接设置左右轮输出。left/right范围是-50~50;正数表示前进,负数表示后退,巡线时会持续调整这两个值。cocube.brake():丢失目标或需要停车时主动刹车。
sg2.change_algo(mode) 里最常用、也最容易混淆的是算法名称。当前固件支持:
Card Recog:卡片识别Color Recog:颜色识别Line Detect:巡线Blob Detect:色块检测AprilTag:AprilTag 标签识别Deep Learning:自学习类别识别Face Recog:人脸识别Obj20Class:20 类物体识别QRcode:二维码识别Motion Detect:运动检测
这一课先只用 Card Recog、Color Recog 和 Line Detect 这 3 种。
先认识这个能力
这一课最重要的一条原则是:
- 一次只做一种视觉任务
比较稳妥的顺序是:
- 先初始化摄像头
- 切到一种算法
- 先把结果打印出来
- 再把结果变成动作或显示
开始编程
1. 卡片识别:看到哪张卡,就执行哪种动作
卡片识别的好处是结果很明确,也最适合当第一种视觉任务。
import time
import cocube
import cocube_sengo2 as sg2
sg2.init()
time.sleep_ms(1000)
sg2.change_algo("Card Recog")
while True:
card = sg2.read_card()
if isinstance(card, str) and sg2.get_card("w") > 25:
print("card =", card)
if card == "forward":
cocube.move_ms(cocube.FORWARD, 25, 500)
elif card == "turn_left":
cocube.rotate_ms(cocube.LEFT, 25, 700)
elif card == "turn_right":
cocube.rotate_ms(cocube.RIGHT, 25, 700)
elif card == "park":
cocube.brake()
time.sleep_ms(100)
这里的关键点是 sg2.get_card("w") > 25。
它能帮助你过滤掉太远、太小的卡片识别结果。
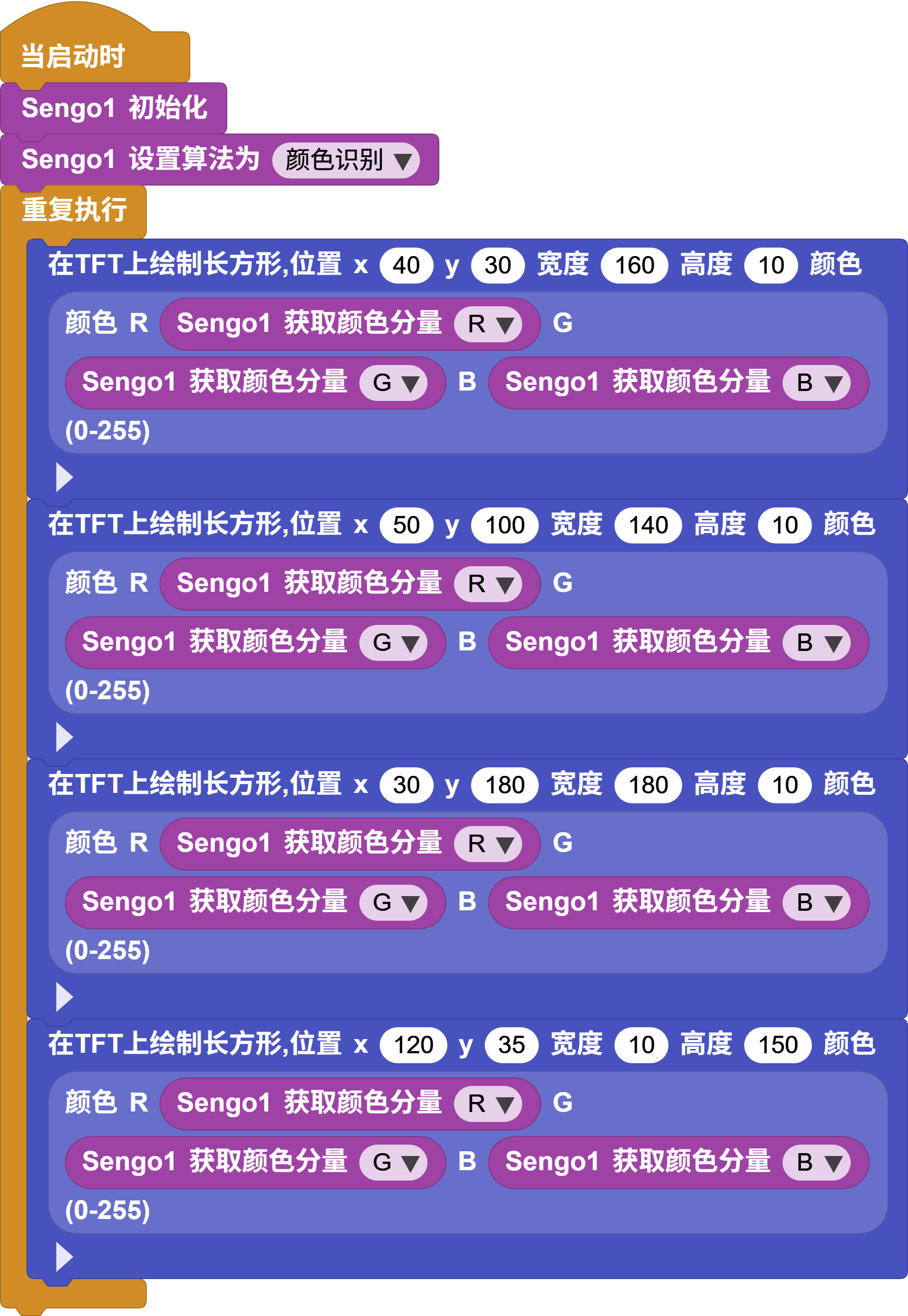
2. 颜色识别:把摄像头看到的颜色直接显示出来
颜色识别很适合和屏幕显示组合在一起。
import time
import display
import cocube_sengo2 as sg2
tft = display.init()
sg2.init()
time.sleep_ms(1000)
sg2.change_algo("Color Recog")
while True:
color_name = sg2.read_color()
if isinstance(color_name, str):
r = sg2.get_color_rgb("R")
g = sg2.get_color_rgb("G")
b = sg2.get_color_rgb("B")
color = display.color565(r, g, b)
tft.fill(color)
display.write(color_name, 70, 110, display.WHITE, color)
time.sleep_ms(150)
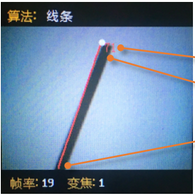
3. 巡线:根据线条位置持续修正方向
巡线比前两种任务更强调控制过程,因为它要持续根据画面修正左右轮速度。
import time
import cocube
import cocube_sengo2 as sg2
sg2.init()
time.sleep_ms(1000)
sg2.change_algo("Line Detect")
base_speed = 20
while True:
x2 = sg2.get_line("x2")
angle = sg2.get_line("degree")
if isinstance(x2, int) and isinstance(angle, int):
error = (x2 - 50) / 6 + (90 - angle) / 6
left = int(base_speed + error)
right = int(base_speed - error)
left = max(-50, min(50, left))
right = max(-50, min(50, right))
cocube.set_wheel(left, right)
else:
cocube.brake()
time.sleep_ms(50)
运行时观察什么
运行视觉程序时,重点看这些现象:
- 算法没切对时,读取函数会直接报错
- 卡片太远时,最好先过滤再触发动作
- 颜色识别更适合做界面反馈
- 巡线任务里,偏差越大,修正通常也要越明显
常见问题 / 使用提醒
- 先
init(),再change_algo(...),最后才调用对应读取函数 - 第一次接触视觉任务时,优先先跑卡片识别
- 先把一种算法跑稳,再切到另一种
- 如果要调巡线,先保证背景和线条对比清楚
挑战一下
先从下面三种任务里任选一种,单独跑通:
- 看牌行动:看到前进卡、左转卡、停车卡就执行动作
- 颜色映射:看见什么颜色,屏幕就变成什么颜色
- 巡线前进:沿着一条清晰的黑线持续修正方向
如果这三种都已经跑稳,再考虑把其中两个组合起来。
快速参考
这一课最常用的写法是:
import cocube_sengo2 as sg2
sg2.init()
sg2.change_algo("Card Recog")
print(sg2.read_card())
sg2.init():初始化摄像头sg2.change_algo(...):切换算法sg2.read_card():读取卡片名称sg2.read_color():读取颜色名称sg2.get_line(...):读取巡线参数
如果想继续查视觉接口,可以查看 摄像头模块说明 和 cocube_sengo2 快速参考。