开始前
这一部分怎么用?
这一部分适合第一次系统接触 CoCube MicroPython 时阅读。
- 先跑通环境,再回来看平台和课程顺序
- 先认识整体能力,再进入具体课程
- 这一部分的目标不是记住所有函数,而是先把“设备、工具、学习路线”理顺
先完成这三件事
- 认识 CoCube 本体、CoMaps 和常用扩展模块
- 把 MicroPython 开发环境搭好,并确认设备能正常连接
- 对后面 9 节课程的学习顺序有一个整体印象
先把 CoCube 看成一个完整平台
CoCube 不只是一个会动的小车,也不只是一个能跑 Python 的开发板。
更准确地说,它是一个把显示、运动、定位、扩展模块和 AI 能力放在同一套任务流程里的机器人平台。
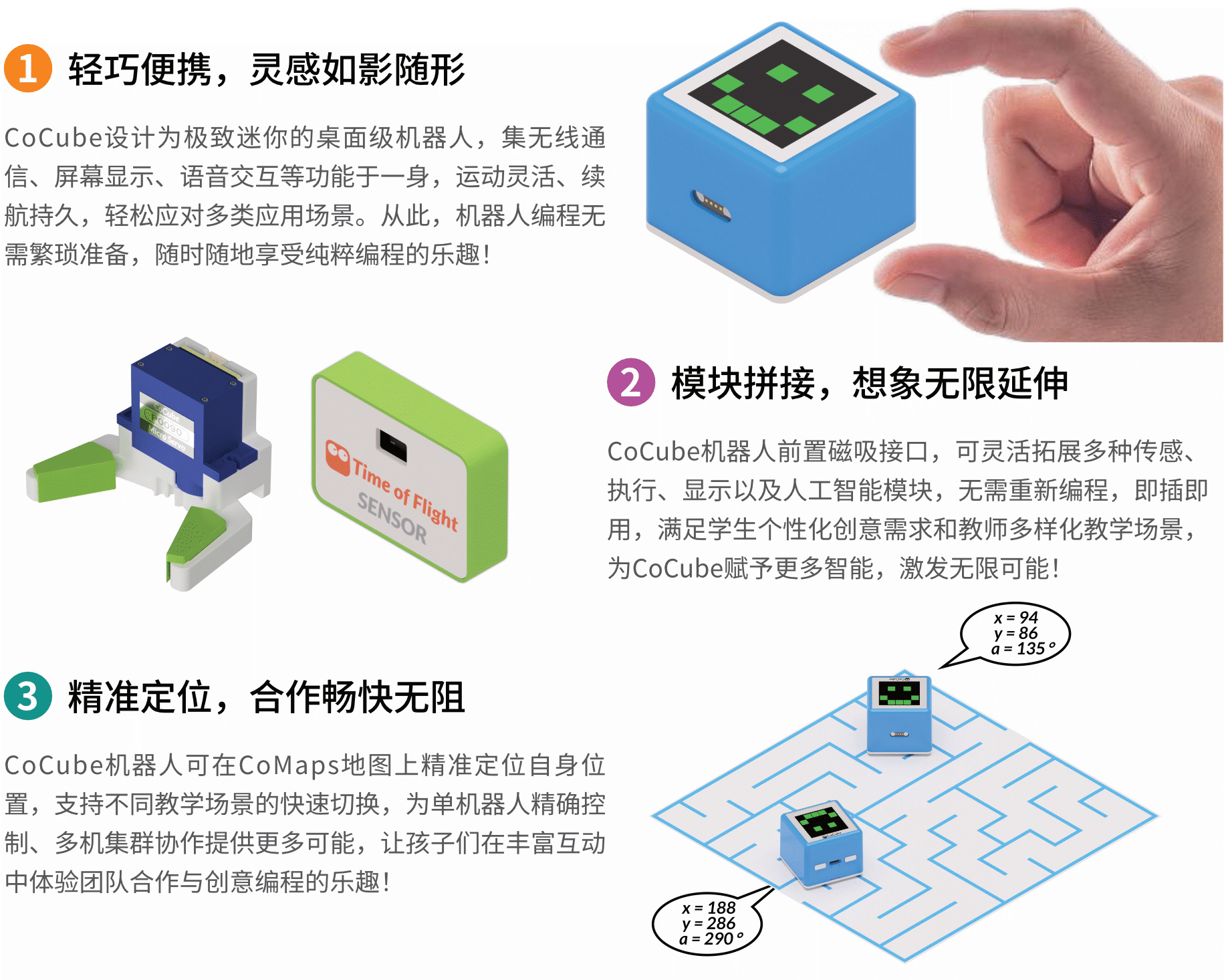
这也是后面课程为什么会从“屏幕显示”一路走到“AI 摄像头”: 前面先学会让结果看得见,后面再逐步加入运动、感知和任务控制。
CoCube 本体可以做什么?


先不用背很多技术名词,记住下面这些能力就够用了:
| 项目 | 现在可以这样理解 |
|---|---|
| 主控 | 一台可以运行 MicroPython 的小型计算设备 |
| 屏幕 | 240 x 240 彩色屏幕,适合显示文字、图形和状态 |
| 移动 | 双履带差速底盘,可以前进、后退、转向和调节左右轮速度 |
| 定位 | 放到 CoMaps 上时,可以读取坐标和角度 |
| 按键 | 机身按键可以做基础交互和控制 |
| 扩展 | 可以接入夹爪、测距、灯板、语音、视觉等模块 |
为什么后面会专门讲 CoMaps?
因为 CoCube 很适合做“有目标的位置任务”。
你后面不只是会让它“往前走一点”,还会让它“走到某个点”“转到某个角度”。
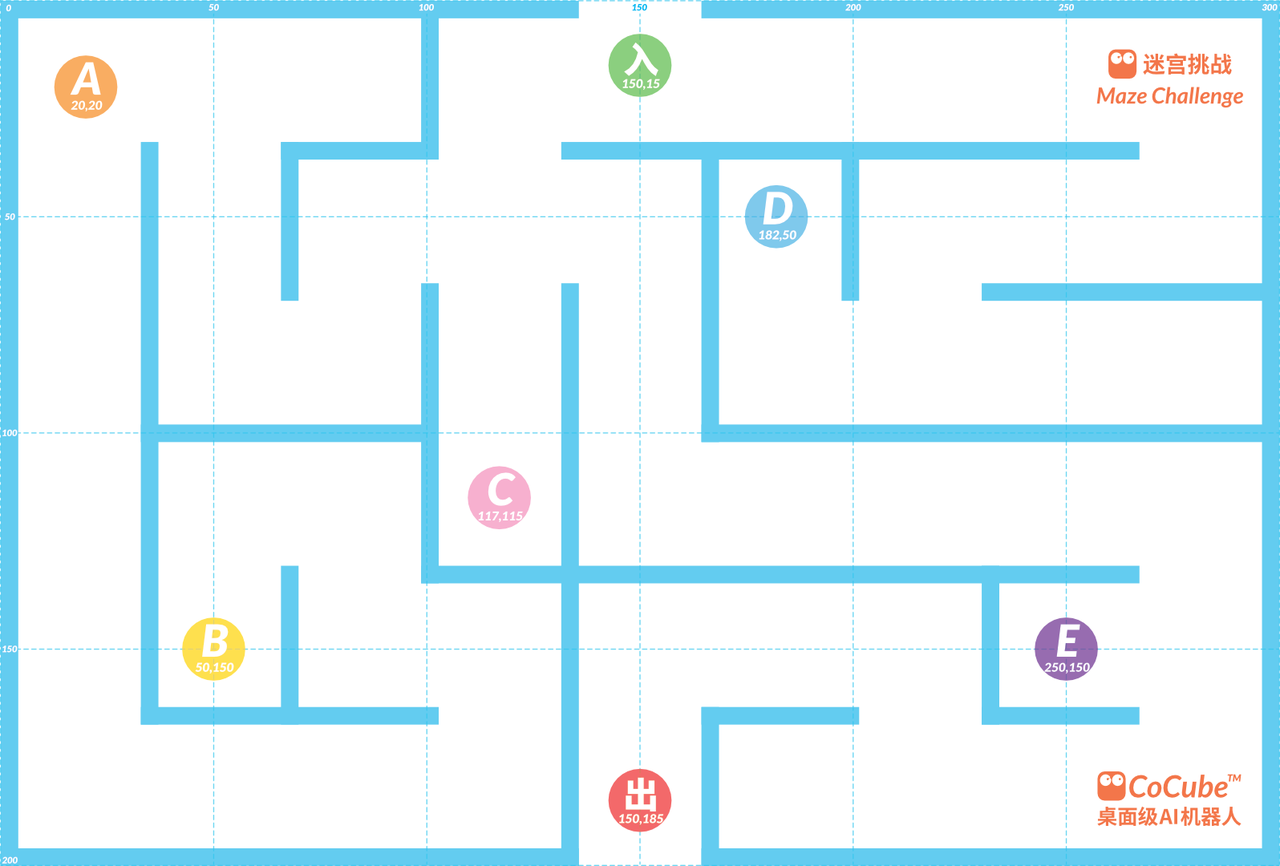
对常见的 CoMaps,可以先记住三件事:
- 左上角附近是坐标起点区域
- 地图上的位置可以用
x、y来描述 - 机器人还有自己的方向角
等学到“位置与速度”那几课时,这张地图就会从“背景板”变成真正的控制依据。
后面还能接什么模块?
除了机器人本体,CoCube 还可以继续扩展不同模块。
这一步不需要马上学会使用,只要先对后面的课程内容有整体印象就够了。
| 模块 | 图片 | 在课程里会用来做什么 |
|---|---|---|
| 舵机夹爪 | 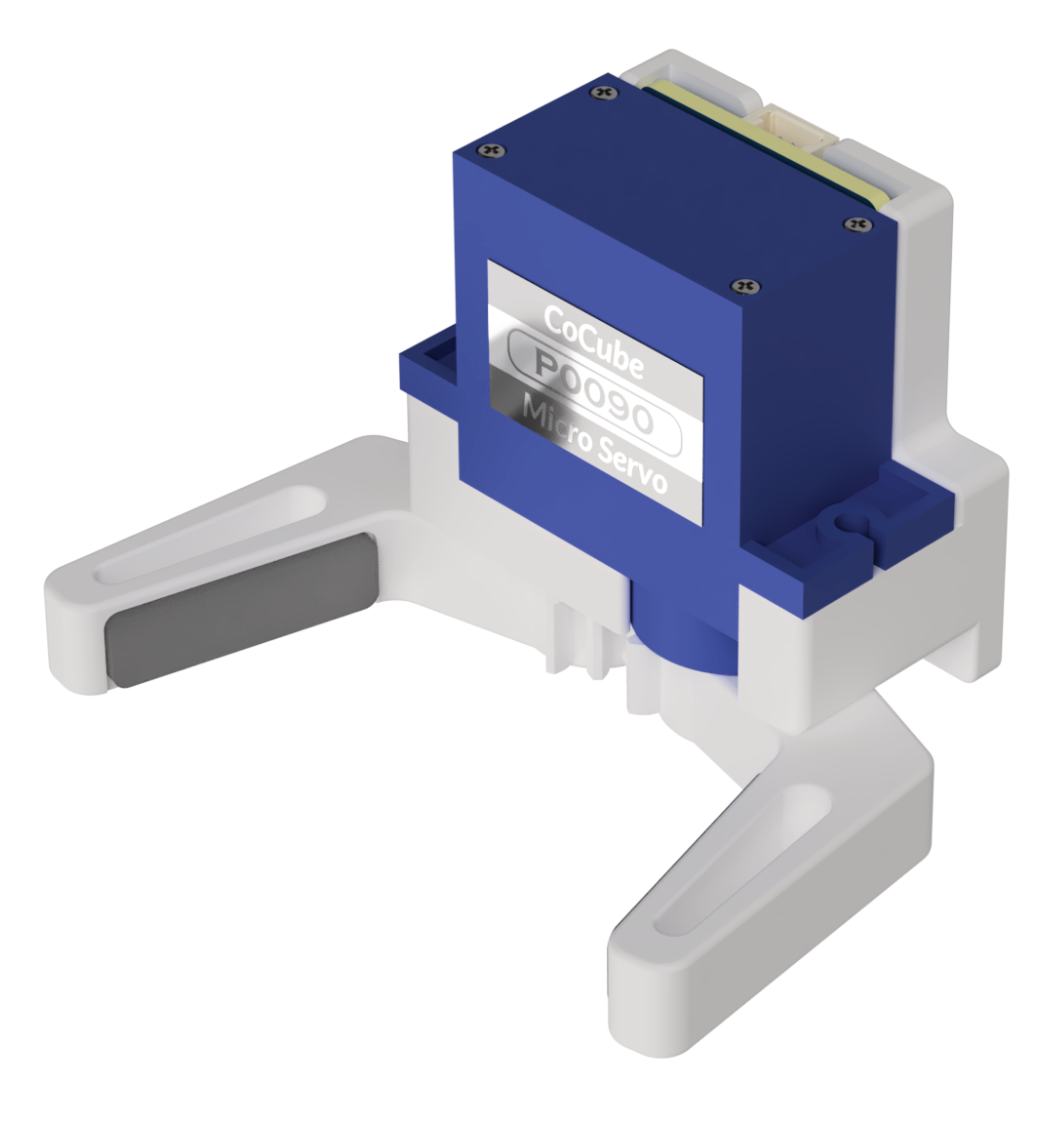 | 做抓取、搬运和执行任务 |
| ToF 测距模块 | 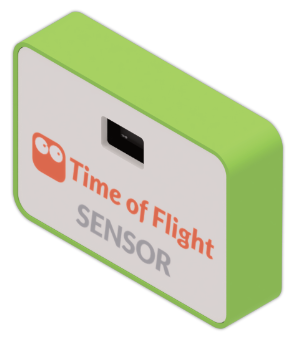 | 读取前方距离,做避障、跟随和安全判断 |
| WS2812 全彩灯板 | 做灯光效果、状态反馈和互动作品 | |
| 3D 手势识别 |  | 做非接触式交互控制 |
| AI 视觉感知模块 |  | 做颜色识别、卡片识别、巡线等视觉任务 |
| 数字光照模块 |  | 读取环境亮度,做明暗判断和自动切换 |
| 语音识别模块 |  | 读取语音命令,做口令控制 |
接下来怎么学更顺?
建议按这个顺序进入后面的内容:
- 先在“搭建开发环境”里把固件、连接和运行流程跑通
- 再在“基础知识”里学会 REPL、脚本运行、保存和
main.py - 然后按“课程路径”逐课推进
- 写代码时,再配合“快速参考”查模块函数
这样更容易知道“现在先解决哪一步”,后面进入具体课程时也不会乱。