基础知识
这一页先抓住几个最常用的入口:在 Shell 里试命令、运行一个会结束的脚本、把文件保存到设备、理解
main.py为什么会自动运行。
本页学完后,你应该能做到
- 在 Thonny 的 Shell 里执行一条 MicroPython 命令
- 分清“在 REPL 里临时试一下”和“把脚本保存到设备里”的区别
- 知道
boot.py、main.py和Ctrl + D分别用在什么场景 - 会用
help('modules')、help()和参考文档继续往下查
建议按这个顺序操作
- 先在 REPL 里确认设备在线
- 再运行一个会自己结束的脚本
- 然后再看本地文件和设备文件
- 最后理解自动运行和文档查询
1. 先在 REPL 里试一条命令
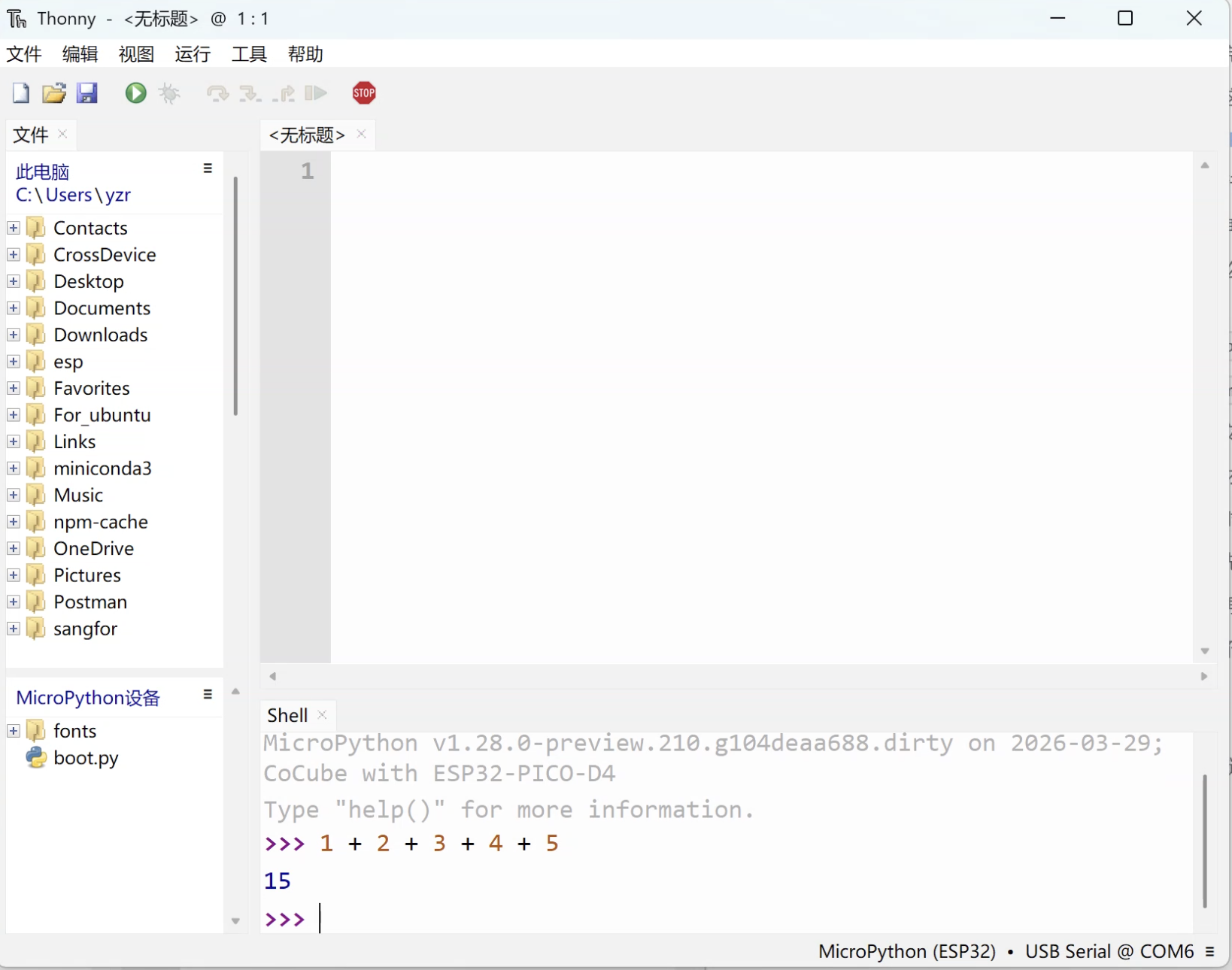
REPL(Read-Eval-Print Loop)是 MicroPython 的交互式提示符。
在 Thonny 里,它对应底部的 Shell 窗口,适合做“先试一条命令看看结果”的检查。
先在 Shell 中输入下面内容并按回车:
1 + 2 + 3 + 4 + 5
这条命令会被发送到 CoCube 上的 MicroPython 解释器执行,结果 15 会被返回并显示在 Shell 里。
Ctrl + C:中断当前正在运行的程序,回到提示符Ctrl + D:执行一次软重启,让 MicroPython 重新跑启动流程
刚开始调试时,REPL 很适合查一个值、试一次导入、确认某个对象是否存在。
真正要反复运行的代码,还是更适合写成脚本文件。
2. 再运行一个会自己结束的脚本
前一节用的是 REPL。
从这一步开始,换到编辑器区域,运行一个可以保存下来的短脚本。
-
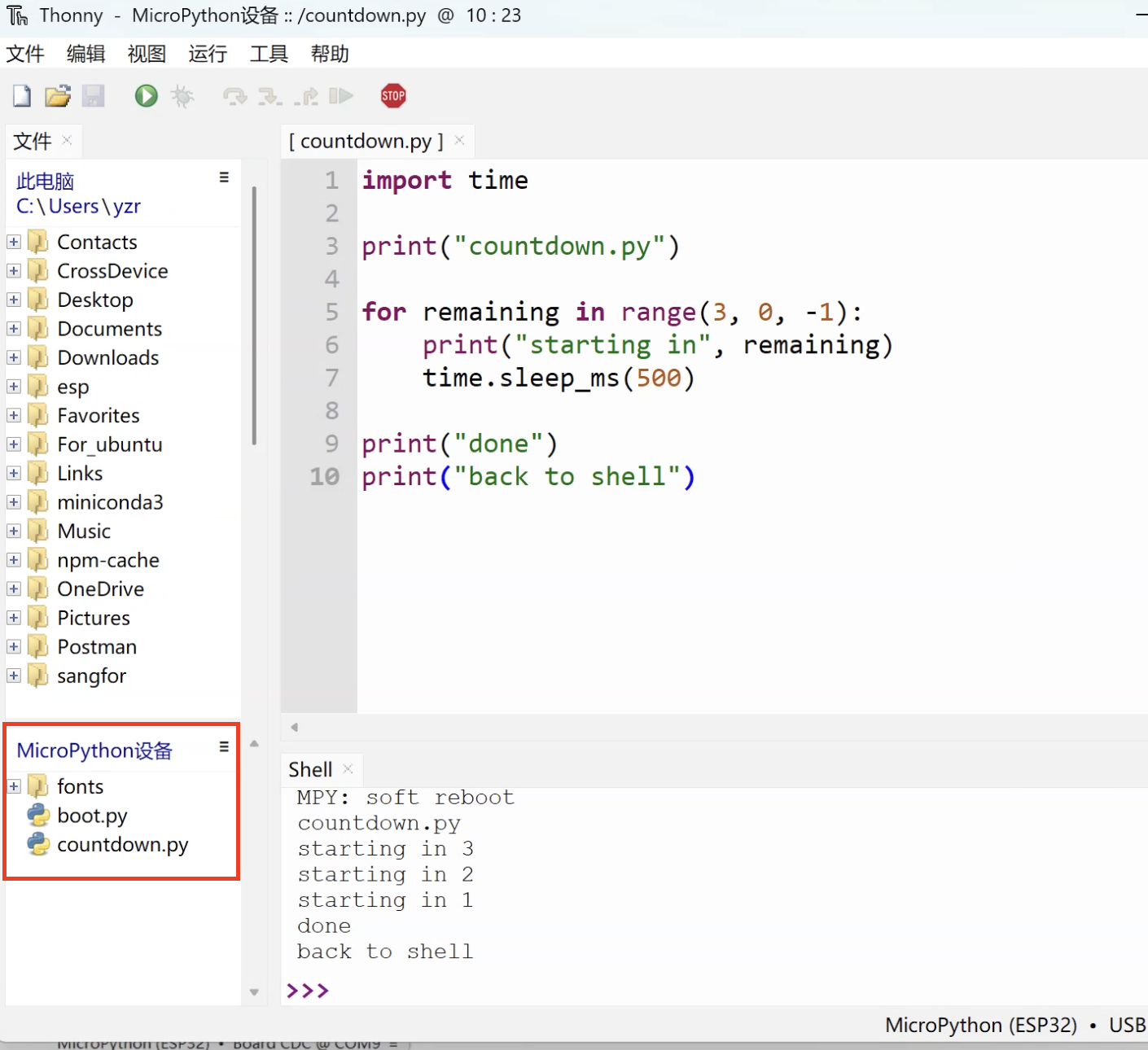
编写脚本:在编辑器中输入下面的代码。
import time
print("countdown.py")
for remaining in range(3, 0, -1):
print("starting in", remaining)
time.sleep_ms(500)
print("done")
print("back to shell") -
运行脚本:点击工具栏绿色的
运行按钮,或按F5。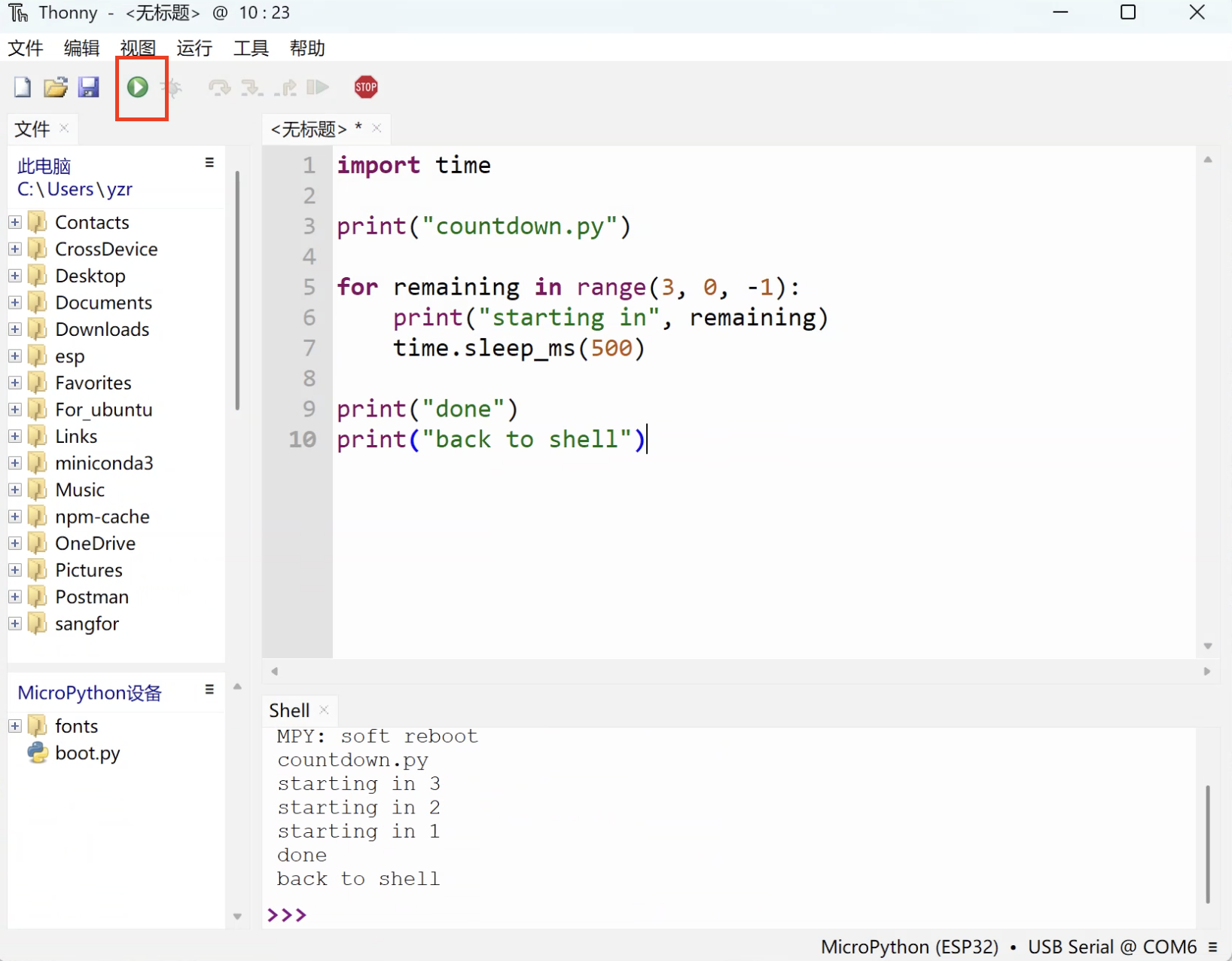
-
观察现象:Shell 会先输出 3、2、1 的倒计时,再打印结束信息,然后重新回到
>>>提示符。
这个例子故意只用了 time 模块,而且不会进入无限循环。
这样你能先把“运行一个脚本”和“脚本运行完会回到 Shell”这件事看清楚。
如果后面你写了一个不会自动结束的程序,也可以用工具栏停止按钮或 Ctrl + C 中断它。
3. 现在再看本地文件和设备文件
脚本在编辑器里写出来以后,还不等于它已经保存在 CoCube 里。
这时再打开文件视图,会更容易理解“本地文件”和“设备文件”的区别。
-
开启文件视图:在 Thonny 顶部菜单栏选择
视图->文件。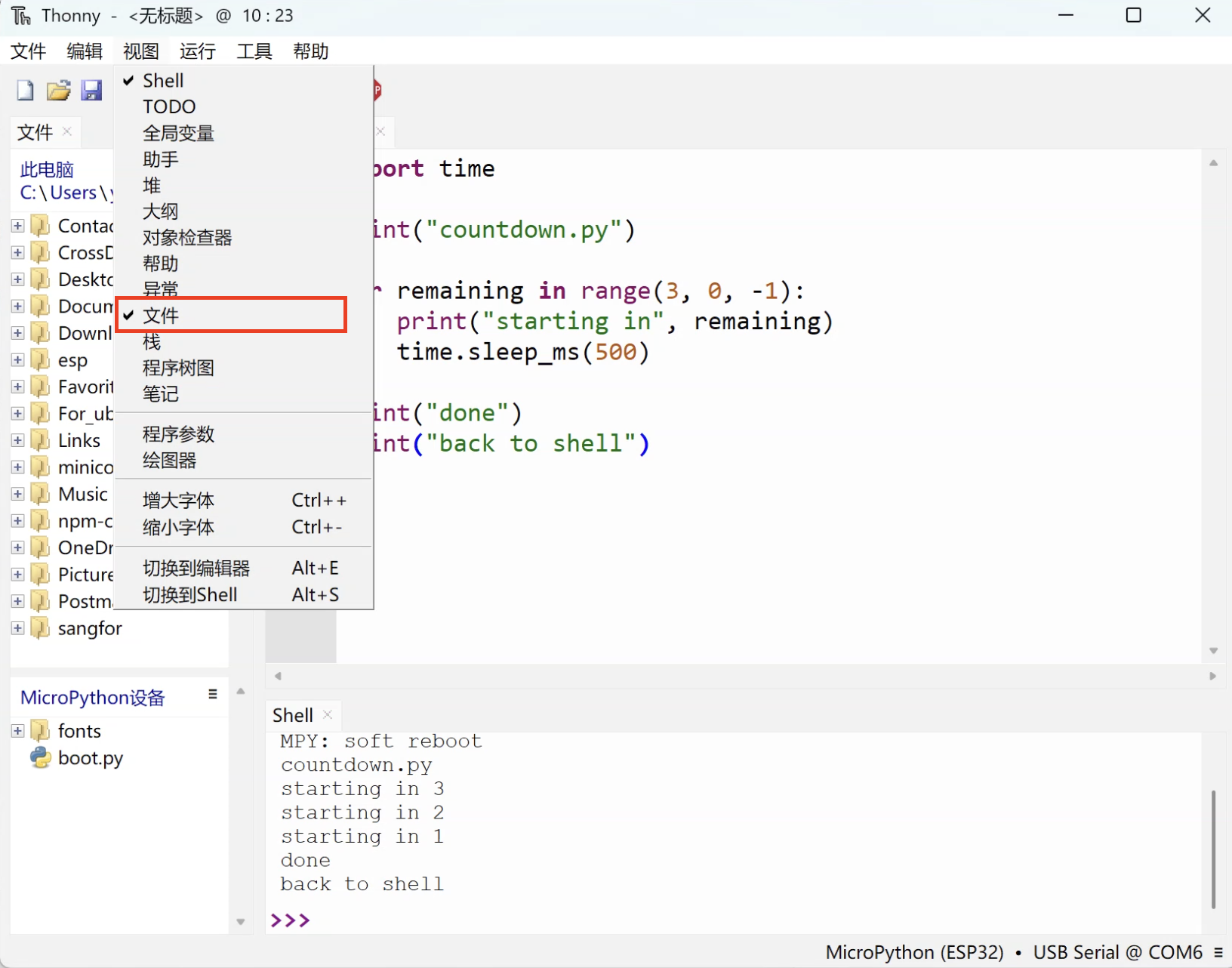
-
识别两个区域:左侧会出现两个文件区。
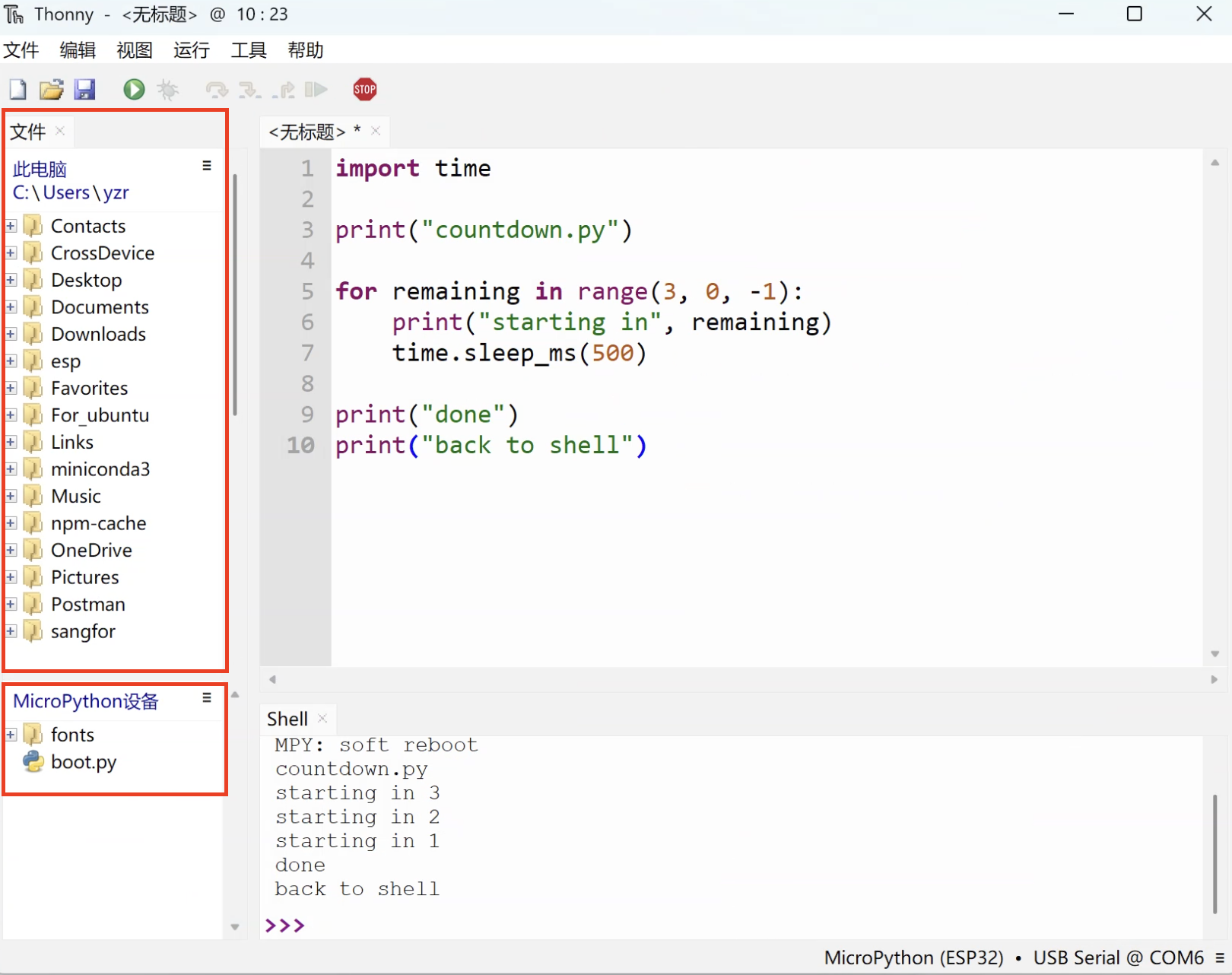
- 上方:电脑本地文件
- 下方:CoCube 上的 MicroPython 文件系统
初始文件在刚烧录好的设备里,通常能先看到一个
boot.py。
它属于启动流程的一部分,先保留默认内容就可以。 -
把脚本保存到设备:点击
保存,选择 MicroPython 设备。
-
输入文件名:例如
countdown.py。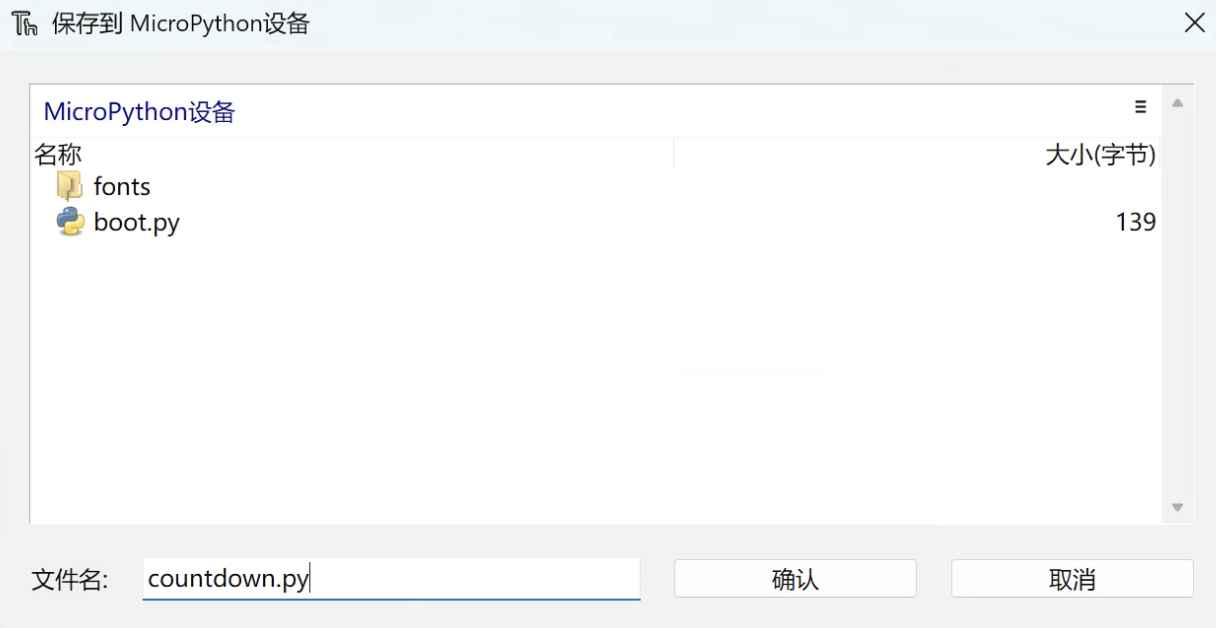
-
确认结果:保存后,你会在设备文件区看到刚才的脚本。
4. 为什么有些程序重启后不会自动运行?
把脚本保存到设备,只说明“文件已经在设备里了”。
它会不会在上电后自动运行,还要看文件名是不是 main.py。
对初学者来说,启动流程先抓住下面这三个节点就够了:
4.1 boot.py(引导脚本)
- 启动时先运行
- 通常放一些底层初始化
- 刚入门时建议先保留默认内容
4.2 main.py(主程序)
- 在
boot.py后运行 - 这里通常放你自己的主程序
- 只有文件名就是
main.py,它才会在开机后自动执行
4.3 交互式解释器(REPL)
如果没有 main.py,或者 main.py 已经执行完,解释器就会回到 REPL。
也就是说,“保存成普通脚本”和“开机自动运行”是两件不同的事。
5. 让刚才的脚本在开机后自动运行
如果你希望上面的倒计时脚本在重新上电后自动执行,可以把它另存为 main.py。
-
打开设备上的脚本:在
MicroPython 设备区域双击刚才保存的文件。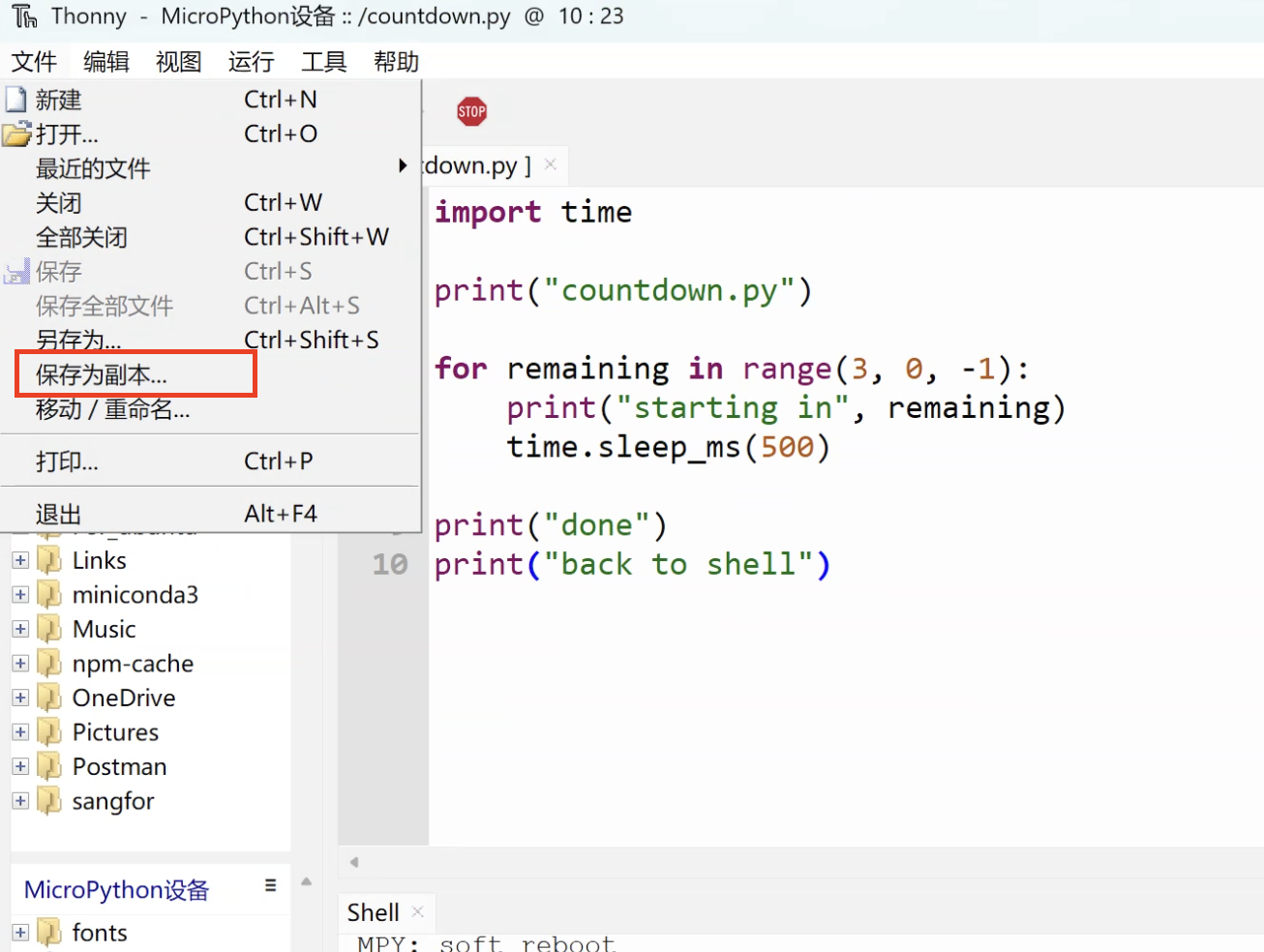
-
另存为
main.py:在菜单栏点击文件->保存为副本,目标仍然选择MicroPython 设备,然后把文件名改成main.py。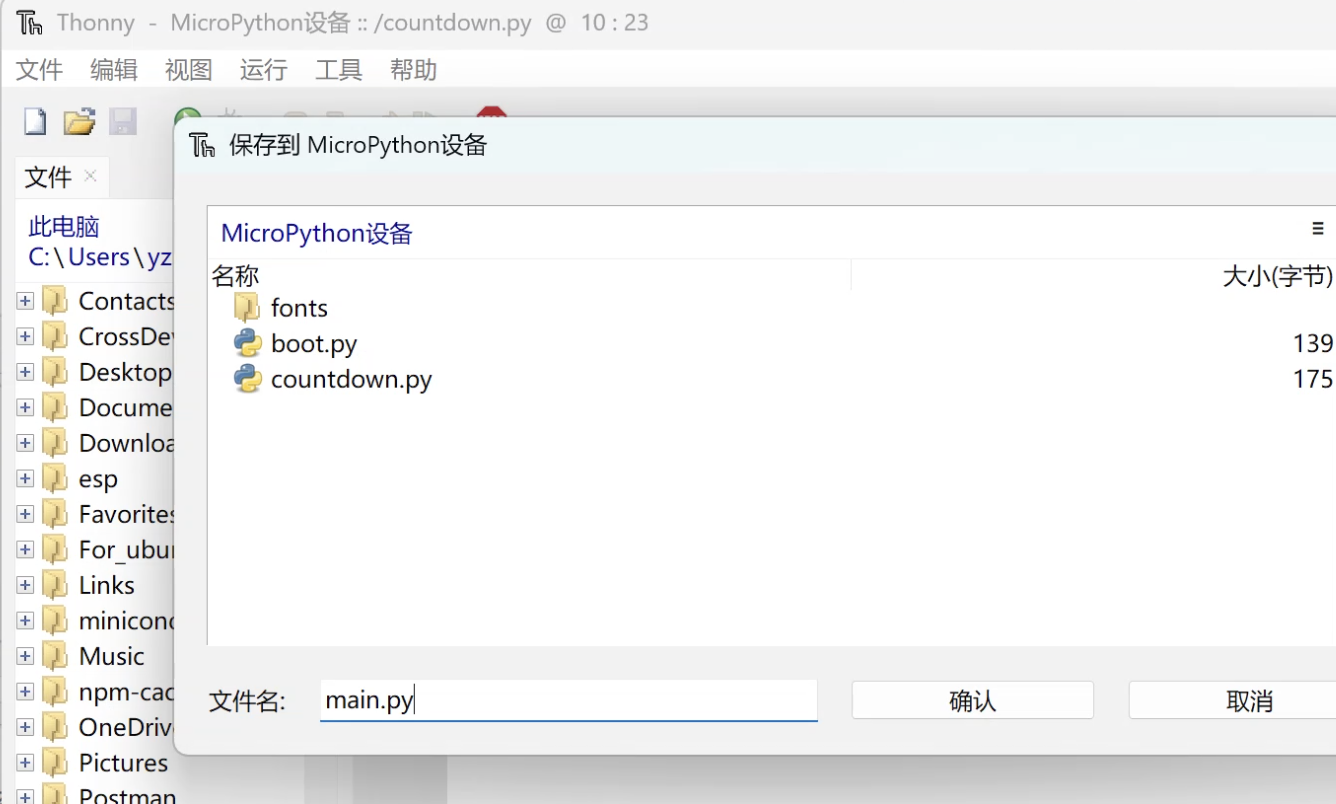
-
验证:在 Shell 里按一次
Ctrl + D,执行软重启,观察main.py是否自动运行。
main.py 的输出?当 Thonny 与 CoCube 建立连接时,默认会发送中断信号,停止当前运行的程序并进入 REPL 模式。此行为可在设置中更改。
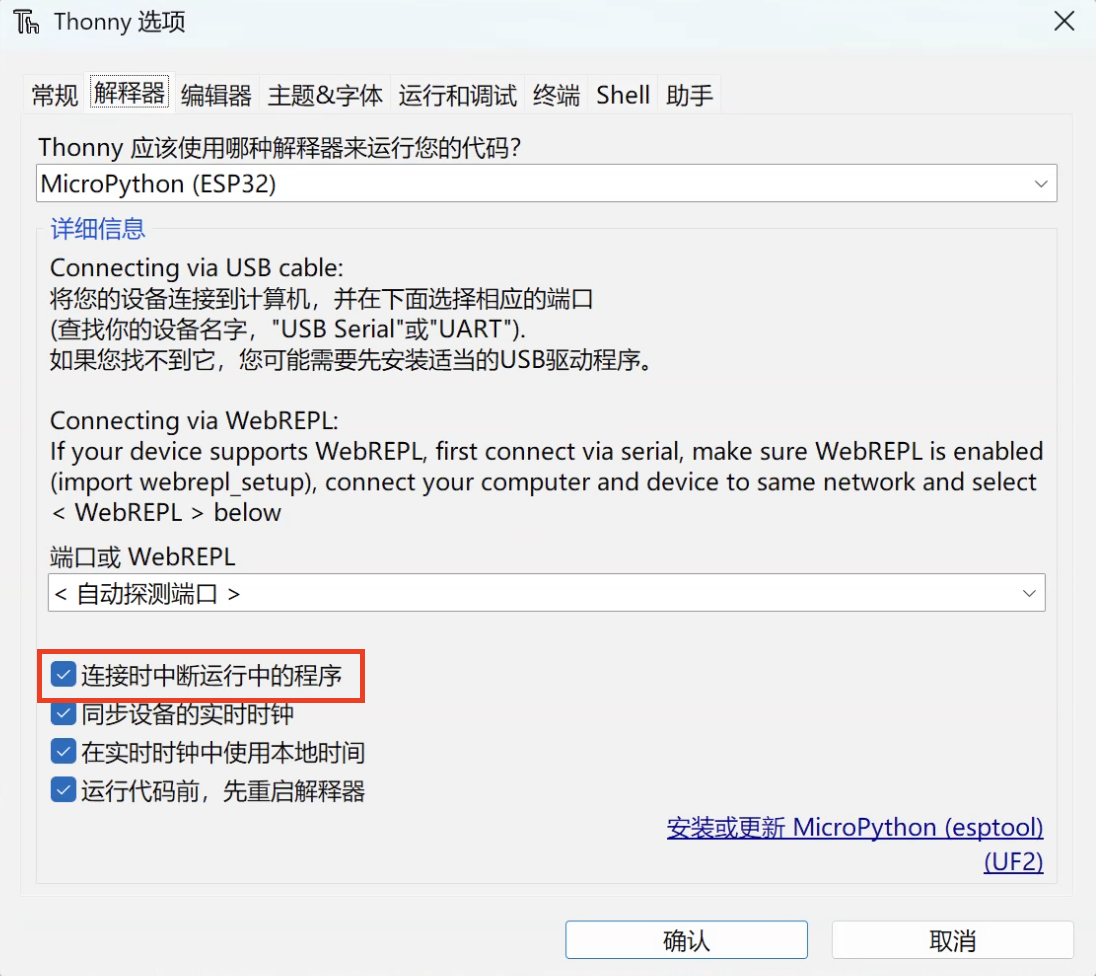
这意味着即使设备刚上电时已经开始运行 main.py,一旦被 Thonny 接管,程序也可能被打断。
这时再按一次 Ctrl + D,就能在保持连接的情况下重新跑启动流程,方便你观察 main.py 从头开始执行的效果。
6. 不会时,先从这几个查询入口开始
这一页不打算把所有内置模块一次讲完。
真正重要的是:当你不确定某个模块或对象该怎么用时,先知道从哪里查起。
6.1 先看当前固件里有哪些模块
在 Shell 中输入:
help('modules')
它会列出当前固件提供的模块名称。
不同芯片、不同固件版本,模块集合可能会略有差异。
6.2 再看某个模块里有什么
例如查看 machine:
import machine
dir(machine)
help(machine)
如果想继续看某个类或函数,也可以把对象直接传给 help()。
help(machine.Pin)
6.3 不会时,优先查哪一类文档
- 想看通用模块:先查“核心库文档”
- 想看当前芯片平台的用法:先查“ESP32 快速参考”
- 想确认快捷键和交互行为:查 “REPL 参考”
- 想确认开机为什么会跑某个文件:查“启动流程参考”
如果你接下来就要开始写 CoCube 的机器人程序,也可以直接回到本站的接口速查页,去看 cocube、display、cocube_module 和摄像头相关说明。
7. 参考链接
这一页主要是把最常用的入口先串起来。
如果要继续查 API 或确认行为细节,可以从下面这些文档开始:
如果你接下来要开始写课程里的机器人代码,本站的 cocube 核心接口速查、display 快速参考 和 cocube_module 快速参考 会更贴近实际课程代码。